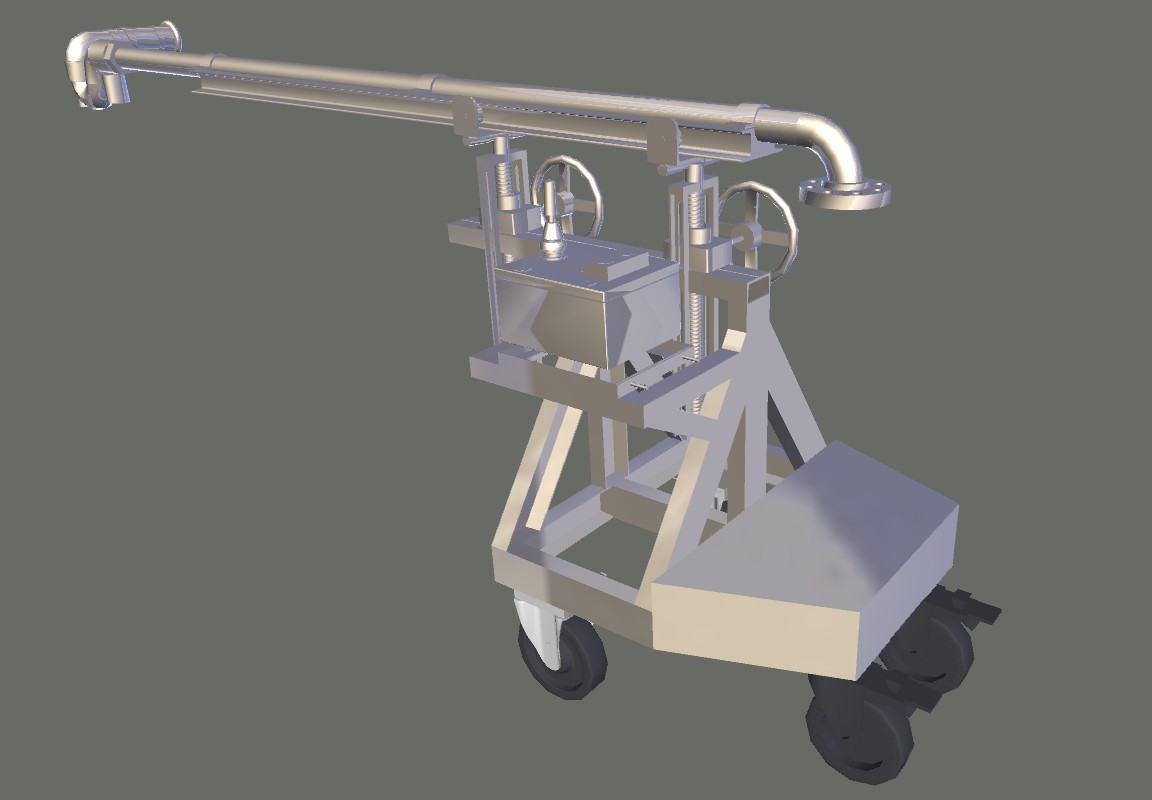
We developed an internal boiler cleaning robot, designed to enter through existing access openings and reach deposit build-ups between tubes in hard-to-access areas. The solution significantly reduced cleaning time and enabled the work to be performed more safely, minimizing personnel exposure to confined spaces and hazardous conditions.
The system integrates precise positioning mechanisms using gear reducers and a worm drive, a joystick and position controller to orient the nozzle, plus an adjustable and programmable nozzle. It also includes a water lance, a stabilizing counterweight, lifting lugs, and multiple design details to ensure reliable, repeatable field operation.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}