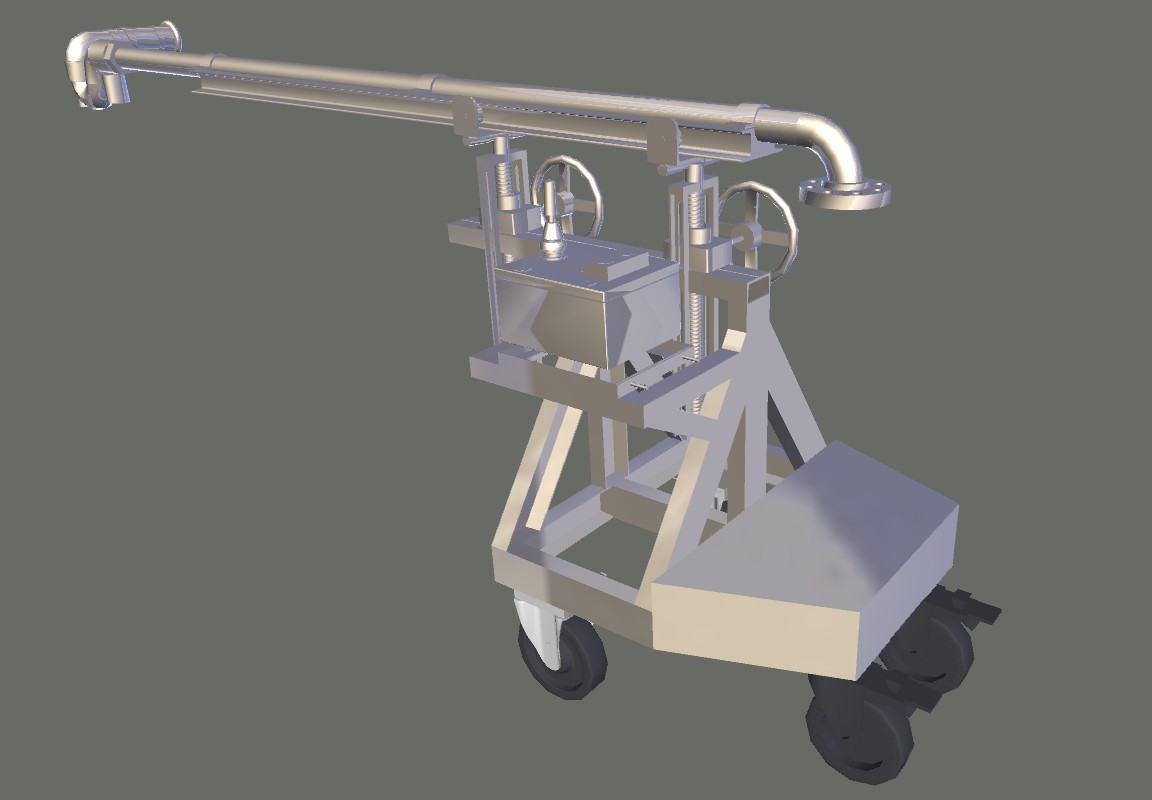
Desarrollamos un robot para limpieza interna de calderas, diseñado para ingresar por aberturas existentes y alcanzar zonas con depósitos entre tubos en sectores de difícil acceso. La solución permitió reducir significativamente los tiempos de limpieza y realizar la maniobra de forma más segura, minimizando la exposición del personal a espacios confinados y condiciones riesgosas.
El sistema integra mecanismos de posicionamiento preciso mediante reductores y tornillo sin fin, joystick y controlador de posición para orientar la tobera, además de tobera ajustable y programable. Incluye lanza para transporte de agua, contrapeso estabilizador, orejas de izaje y detalles de diseño orientados a una operación confiable y repetible en campo.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}